
Bochumer Verifikationsprojekt - Sensorstation 2000
Im Rahmen eines Vorhabens zur Friedensforschung soll unter der Leitung von
Frau Prof. Dr. Beate Meffert
ein Messgeraet entwickelt werden,
dass fuer die kooperative Verifikation von Abruestungsmassnahmen einsetzbar ist.
Kooperativ heisst dabei, dass beide Seiten, die zu ueberpruefende Seite und die
Vor-Ort-Inspekteure, im gegenseitigen Einvernehmen handeln.
Ein Beispiel fuer einen derartigen Ruestungskontrollvertrag ist der KSE-Vertrag
aus dem Jahre 1990 (KSE: Konventionelle Streitkraefte in Europa).
Er legt zwischen NATO- und frueheren Warschauer-Vertrags-Staaten Obergrenzen fuer Panzer,
gepanzerte Kampffahrzeuge, Artillerie, Kampfflugzeuge und Kampfhubschrauber fest.
Das Messgeraet soll in Feldversuchen
Signale registrieren, die von vorbeifahrenden militaerischen Landfahrzeugen
verursacht werden. Dazu werden an das Messgeraet Mikrofone (Sensoren fuer den
Schall) und Geofone (Sensoren fuer die Bodenvibration) angeschlossen.
Die akustischen und seismischen Signale werden in den Frequenzbereich transformiert,
eine Obertonanalyse sucht die Grundschwingung, und es wird versucht, auf den
Fahrzeugtyp zu schliessen.



Erste eigene Untersuchungen [1] wurden im Jahre 1995 mit folgenden Parametern durchgefuehrt:
- 3 Fahrzeugtypen: Daimler Benz 1017, Faun SLT 50 und M 113
- 48 Vorbeifahrten
- Fahrzeuggeschwindigkeiten von 5 bis 40 km / h
- Geofon 3,6 m vom Strassenrand entfernt
- Signaldauer 2 s
- je Signalabschnitt 2048 Messwerte
![Kanonischer Merkmalsraum [1]](lopez.gif)
Das Bochumer Verifikationsprojekt (BVP) hat eine Reihe von Experimenten an schweren Militaerfahrzeugen durchgefuehrt. Dabei wurden die akustischen, seismischen und magnetischen Signale so weit analysiert, dass nun mit der Erprobung im Feldexperiment begonnen werden kann. Im gegenwaertigen, vom BMBF gefoerderten Projekt (Foerderkennzeichen 01LX 9908/9) soll eine Feldsensorstation mit akustischen und seismischen Messkanaelen ausgelegt und aufgebaut werden. Die Station soll dann ueber einige Monate auf einem militaerischen Uebungsgelaende betrieben werden. Die gewonnenen Fahrzeugsignale sollen analysiert und daraufhin Verbesserungen fuer das Messgeraet vorgeschlagen werden.
Projektmitarbeiter:
- Prof. Dr. B. Meffert (Projektleiterin)
- S. Dziwisz
- Dr. M. Guenther
- L. Heese
- N. Hochmuth
- Dr. O. Hochmuth
- S. Kaaz
- S. Kraus
- A. Weiss (Licht)
- Dr. T. Morgenstern
- T. Scherschmidt
- Dr. F. Winkler
Stellenausschreibungen:
{kind=link}
Links zum Vorhaben:
- Ruhr-Universitaet Bochum
- Humboldt-Universitaet zu Berlin
- Bundesministerium fuer Bildung und Forschung BMBF, Bonn
- Forschungsverbund Naturwissenschaft, Abruestung und internationale Sicherheit FONAS, Hamburg
- Center for Science and International Security CENSIS, Hamburg
- Interdisziplinaere Arbeitsgruppe Naturwissenschaft, Technik und Sicherheit IANUS, Darmstadt
- Schleswig-Holsteinisches Institut fuer Friedensforschung SCHIFF, Kiel
Literatur:
- Lopez, D.: Diskriminanz
analytische Unter suchungen von Schall signalen militae rischer Land fahrzeuge. Diplomarbeit am Fachbereich Elektrotechnik der HU Berlin, 1995 - Lopez, D.: Seismic Classification of Military Vehicles using Statistical Pattern Recognition. in "Verification - Research Reports, No. 7". Bochum: Brockmeyer 1995
Publikationen:

- Meffert, B., Guenther, M., Heese, L., Hochmuth, O., Kell, G., Morgenstern, T., Weiss, A. und Winkler, F.: Mehrkanalige, hochaufloesende Sensorstation zur Erfassung und Verarbeitung akustischer und seismischer Signale schwerer Landfahrzeuge. 8. FONAS-Fachgespraech: Verifikationsforschung - Ergebnisse der vom BMBF gefoerderten Projekte, Berlin: Maerz 2001 (Poster)
- Weiss, A., Linev, S. und Altmann, J.: Akustisch-seismische Fahrzeugmessungen fuer die Verifikation. Fruehjahrstagung der Deutschen Physikalischen Gesellschaft, Hamburg: Maerz 2001
- Hochmuth, O. Kell, G., Winkler, F., Weiss, A., Linev, S.,
Meffert, B.:
Mehrkanalige, hochaufloesende Sensorstation fuer die Klassifikation schwerer
Landfahrzeuge. Fruehjahrstagung der Deutschen Physikalischen Gesellschaft,
Hamburg: Maerz 2001
(Kurzfassung,
Vortrag
 )
)
- Kell, G., Hochmuth, O., Meffert, B., Winkler, F.: Hochaufloesende Messungen akustischer Signale unter Feldbedingungen. Jahrestagung der Deutschen Gesellschaft fuer Akustik, Hamburg: Maerz 2001 (Kurzfassung)
- Altmann, J., Linev, S., Weiss, A.: Akustisch-seismische Messungen zur Verifikation von Fahrzeugbeschraenkungen. Jahrestagung der Deutschen Gesellschaft fuer Akustik, Hamburg: Maerz 2001
- Meffert, B., Hochmuth, O.: Signale fuer die Abruestung. Berlin: Humboldt-Spektrum 8 (2001) 2, 16-20
- Linev, S., Altmann, J., Weiss, A.: Acoustic-seismic military-vehicle measurements of 2000 at Meppen, Germany. in "Verification - Research Reports, No. 11". Lenzen: Verlag Georg Grüneberg 2001 (Titel)
- Meffert, B., Hochmuth, O. et al: Sensor station 2000 for acoustic and seismic measurements of high dynamic range. in "Verification - Research Reports, No. 11". Lenzen: Verlag Georg Grüneberg 2001 (Titel, Kurzfassung)
- Weiss, A.: Sensor Verification and Automatic Detection of Heavy Land Vehicles. 13th International Summer Symposium on Science and World Affairs, Berlin: Juli 2001
{kind=link}
{kind=link}
Presse:
- 8. und 9. FONAS-Fachgespraech: Verifikationsforschung, Berlin: Maerz 2001 (Sueddeutsche Zeitung)
Firmen:
Datenblaetter:
- Mikrofonkapsel B&K 4188
- Mikrofonverstaerker B&K 2669 (in der Außeneinheit B&K 4198 verwendet)
- Geofon SM-6
- Geofon SM-6
- Messbereichsumschalter AD7524
- Anti-aliasing-Tiefpass MAX274
- Anti-aliasing-Tiefpass BB-UAF42
- Instrumentationsverstaerker MAX436
- Feuchtesensor Philips H1
- Drucksensor Motorola MPXS4100
- Temperatursensor Analog Devices AD592
- Audio-ADU CS5397, Datenblatt
- Audio-ADU CS5397, Produktionformation
- Audio-ADU CS5397, Evaluation Board
- Audio-ADU CS5397, psychoakustisches Filter
- 24-Bit-ADU BB-ADS1210
Schaltungsvariante 3, Vibrationsmessungen am Schwingtisch (16. 08. 2000, 12 Uhr):
Messfrequenz stets 100 HzAbtastfrequenz stets 2048 Hz
Beobachtungsdauer stets 1 Sekunde
Vertikalgeofon SM6 im PE-3-Gehaeuse
 VSS= 155.81 mm/s, Dynamik 66 dB oder 11 bit
VSS= 155.81 mm/s, Dynamik 66 dB oder 11 bit
 VSS= 80.23 mm/s, Dynamik 60.5 dB oder 10 bit
VSS= 80.23 mm/s, Dynamik 60.5 dB oder 10 bit
 VSS= 1.42 mm/s, Dynamik 29.5 dB oder 5 bit
VSS= 1.42 mm/s, Dynamik 29.5 dB oder 5 bit
 VSS= 19.48 mm/s, Dynamik 52 dB oder 9 bit
VSS= 19.48 mm/s, Dynamik 52 dB oder 9 bit
 VSS= 9.93 mm/s, Dynamik 54 dB oder 9 bit
VSS= 9.93 mm/s, Dynamik 54 dB oder 9 bit
 VSS= 0.19 mm/s, Dynamik 29.8 dB oder 5 bit
VSS= 0.19 mm/s, Dynamik 29.8 dB oder 5 bit
 VSS= 6.77 mm/s, Dynamik 52 dB oder 9 bit
VSS= 6.77 mm/s, Dynamik 52 dB oder 9 bit
 VSS= 3.63 mm/s, Dynamik 60.8 dB oder 10 bit
VSS= 3.63 mm/s, Dynamik 60.8 dB oder 10 bit
 VSS= 0.13 mm/s, Dynamik 33.6 dB oder 6 bit
VSS= 0.13 mm/s, Dynamik 33.6 dB oder 6 bit
Schaltungsvariante 3, Messungen der Bodenvibration auf der Strasse (16. 08. 2000, 17 Uhr):
nichtmilitaerische LandfahrzeugeAbtastfrequenz stets 2048 Hz
Beobachtungsdauer stets 1 Sekunde
Vertikalgeofon SM6 im PE-3-Gehaeuse

 VSS= 0.42 mm/s, Dynamik 44 dB oder 8 bit
VSS= 0.42 mm/s, Dynamik 44 dB oder 8 bit

 VSS= 6.78 mm/s, Dynamik 66 dB oder 11 bit
VSS= 6.78 mm/s, Dynamik 66 dB oder 11 bit

 VSS= 0.46 mm/s, Dynamik 45.4 dB oder 8 bit
VSS= 0.46 mm/s, Dynamik 45.4 dB oder 8 bit
 VSS= 0.14 mm/s, Dynamik 49.6 dB oder 9 bit
VSS= 0.14 mm/s, Dynamik 49.6 dB oder 9 bit

 VSS= 6.79 mm/s, Dynamik 66 dB oder 11 bit
VSS= 6.79 mm/s, Dynamik 66 dB oder 11 bit

 VSS= 0.69 mm/s, Dynamik 46.6 dB oder 8 bit
VSS= 0.69 mm/s, Dynamik 46.6 dB oder 8 bit
Schaltungsvariante 2 (4kanalig):
Gehaeuse als 5¼-Zoll-Einschub:
5¼-Zoll-Einschub:
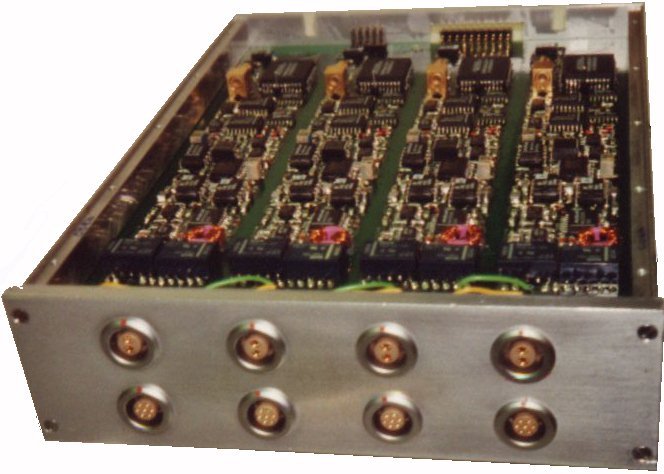
Netzteilplatine (inkl. Wettersignale):
Analogplatine (4kanalig):
Schaltungsvariante 2, Vibrationsmessungen am Schwingtisch (20. 09. 2000, 16 Uhr):
Abtastfrequenz stets 4 kHzBeobachtungsdauer stets 1 Sekunde
Horizontalgeofon SM6 im PE-3-Gehaeuse
Hammerschlag:
 VSS= 724 mm/s, Dynamik 138.5 dB oder 23 bit
VSS= 724 mm/s, Dynamik 138.5 dB oder 23 bit
Messfrequenz stets 10 Hz:
 VSS= 6 mm/s
VSS= 6 mm/s
 VSS= 0.445 mm/s
VSS= 0.445 mm/s
 VSS= 5.5 µm/s
VSS= 5.5 µm/s
Widerstand an Stelle des Geofons:
 VSS= 3.8 µm/s
VSS= 3.8 µm/s
Schaltungsvariante 2, Messungen der Bodenvibration auf der Strasse (25. 09. 2000, 15 Uhr):
nichtmilitaerische LandfahrzeugeAbtastfrequenz stets 4 kHz
Beobachtungsdauer stets 1 Sekunde
Horizontalgeofon SM6 im PE-3-Gehaeuse
 VSS= 6.25 mm/s
VSS= 6.25 mm/s
 VSS= 0.235 mm/s
VSS= 0.235 mm/s
 VSS= 0.185 mm/s
VSS= 0.185 mm/s
 VSS= 0.27 mm/s
VSS= 0.27 mm/s
 VSS= 0.54 mm/s
VSS= 0.54 mm/s
 VSS= 0.225 mm/s
VSS= 0.225 mm/s
 VSS= 0.2 mm/s
VSS= 0.2 mm/s
 VSS= 0.172 mm/s
VSS= 0.172 mm/s
 VSS= 83 µm/s
VSS= 83 µm/s
 VSS= 80 µm/s
VSS= 80 µm/s
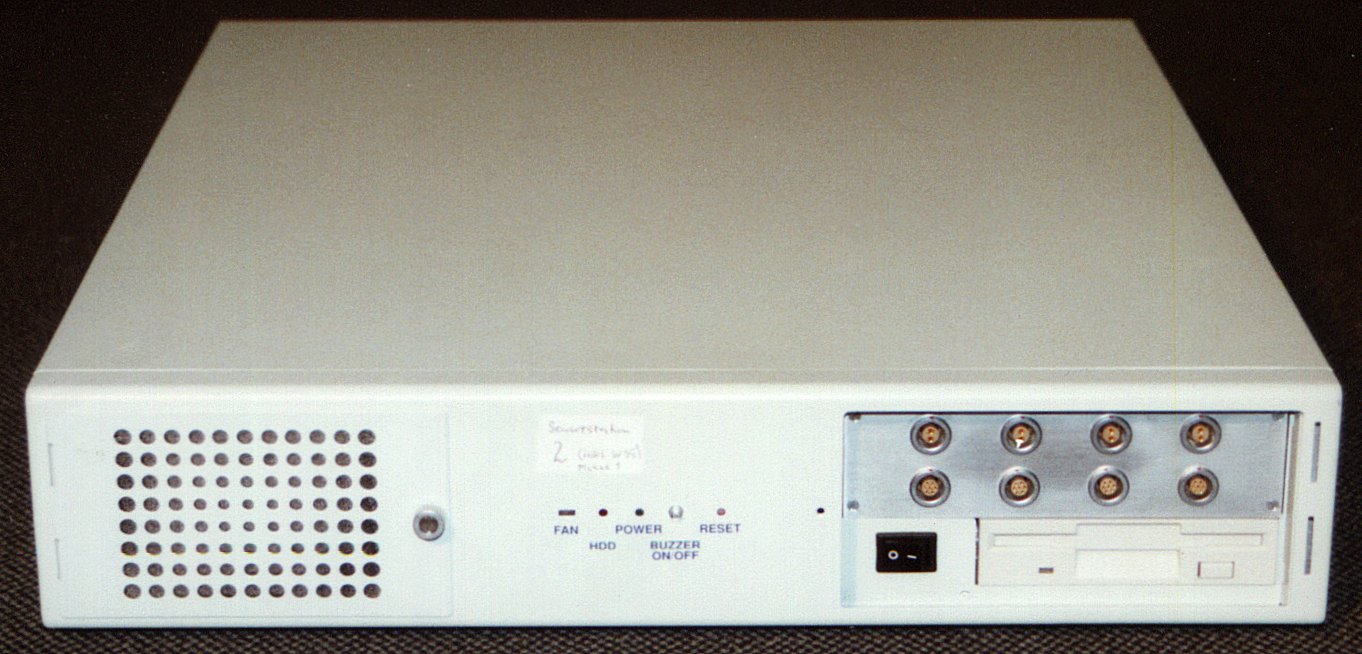
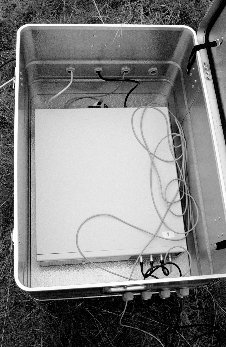
Sensorstation:
Ein Geofon SM6 mit Erdspiess steckt im Boden, dahinter die Sensorstation 2 mit analogem Eingangsteil (rechts oben).
Abmessungen zirka 483 breit, 88 mm hoch und 473 mm tief.
Sensorstation 1 in Meppen (oben: Ethernetkabel, Stromkabel, unten: 4 Sensorkabel)
Blockschaltbild:
M: Mantisse, E: Exponent
Feldmessungen in Meppen (Oktober 2000):
Zu Gast bei der Wehrtechnischen Dienststelle fuer Waffen und Munition der Bundeswehr in Meppen (Emsland) Axel Weiss
Axel Weiss
 Sergej Linev und Axel Weiss
Sergej Linev und Axel Weiss
Untersuchungen zum Web-Geofon (Januar bis Maerz 2001):
Ein Geofon SM6 nimmt die Bodenvibration im Institutsgebaeude auf und ist an eine Sensorstation angeschlossen. Die seismischen Signale werden vom Sensor erfasst und in der Sensorstation digitalisiert. Die Abtastfrequenz betraegt intern 32768 Hz. Das Signal wird tiefpassgefiltert und im Verhaeltnis 1:16 dezimiert (2048 Hz). Ein noch mehr dezimiertes Signal wird erzeugt, indem das Signal erneut tiefpassgefiltert und im Verhaeltnis 1:4 dezimiert wird (512 Hz). Beide Signale koennen "in Echtzeit" von jedem java-faehigen Browser empfangen und dargestellt werden. Beide Signale werden zusaetzlich einer Diskreten Fouriertransformation unterworfen. Die Spektren koennen ebenfalls im Browser-Fenster angezeigt werden. Die mittlere Amplitude des Signals wird durch den RMS-Algorithmus (root mean square) ermittelt und kann ebenfalls im Browser angezeigt werden. Die RMS-Signale benoetigen die geringste Uebertragungsrate beim Transport ueber das Internet. © Axel Weiss
© Axel Weiss
Sensoren:
© Dr.-Ing. Olaf Hochmuth
Erstellt am 2. 1. 2000, zuletzt geaendert am Dienstag, 10. Juni 2003